Synchronní elektromotor s budícím vinutím
Vinutí rotoru se skládá z měděných nebo hliníkových tyčí na koncích zkratovaných dvěma kroužky (klece nakrátko). Statorové vinutí (budící vinutí) je napájeno střídavým proudem ze sítě – vzniká točivé magnetické pole, které indukuje proud ve vinutích rotoru. Na vodiče přenášející proud vinutí rotoru z magnetického pole budícího vinutí působí elektromagnetické síly – vzniká točivý moment, který táhne rotor za magnetickým polem. Frekvence otáčení rotoru nemůže dosáhnout frekvence otáčení magnetického pole statoru (proto se elektromotor nazývá asynchronní), jinak se úhlová rychlost otáčení magnetického pole vzhledem k vinutí rotoru stane nulovou a magnetické pole přestane indukovat EMF ve vinutí rotoru a vytvářet točivý moment.
Indukční motor s fázovým rotorem
Vinutí rotoru je vyvedeno na sběrací kroužky, které se otáčejí s hřídelí stroje. Pomocí kov-grafitových kartáčů klouzajícího po těchto kroužcích je k obvodu vinutí rotoru připojen balastní reostat. Zvýšením odporu reostatu v okamžiku spouštění můžete zvýšit rozběhový moment a snížit rozběhový proud.
Synchronní elektromotory
Statorové vinutí (vinutí kotvy) je napájeno střídavým proudem ze sítě – vzniká točivé magnetické pole. Na rotoru je indukční vinutí spojené se sběracími kroužky. Při startování jsou vinutí rotoru zkratována nebo přes reostat a motor zrychluje v asynchronním režimu. Po dosažení otáček blízkých jmenovitým otáčkám je induktor buzen stejnosměrným proudem – vzniká konstantní magnetické pole, které je v záběru s magnetickým polem statoru a začíná se s ním synchronně otáčet (motor vstupuje do synchronismu).
Provozní režimy asynchronního motoru
Elektromotor přeměňuje elektrickou energii spotřebovanou ze sítě na mechanickou energii.
Asynchronní motor se přepne do režimu generátoru, pokud se rotor začne otáčet rychleji než magnetické pole – na hřídeli se objeví brzdný moment. V tomto režimu elektromotor přeměňuje mechanickou energii na elektrickou a dodává ji do sítě.
Asynchronní motor se přepne do režimu elektromagnetické brzdy, pokud se rotor a magnetické pole statoru otáčí různými směry – na hřídeli se objeví brzdný moment, ale motor nadále spotřebovává elektřinu ze sítě – veškerá spotřebovaná energie je využita k ohřevu motoru.
Způsoby regulace rychlosti otáčení asynchronního motoru
Do obvodu rotoru (motor s vinutým rotorem) se zavádějí další odpory – mechanické vlastnosti motoru se změknou (zhorší se stabilita provozu, zvýší se skluz), sníží se otáčky, zvýší se rozběhový moment a zachová se přetížitelnost.
Nevýhody: velké ztráty na reostatu, skokově se mění otáčky.
Pro tento způsob řízení se používají frekvenční měniče. Pokud při změně frekvence uložte beze změny magnetický tok (a proto musíme udržovat poměr U/f konstantní), pak dostaneme rodinu mechanických charakteristik se stejnou tuhostí a přetížitelností.
Výhody: plynulá regulace, výborné ekonomické vlastnosti, možnost zvýšení frekvence nad 50 Hz (frekvence sítě).
Jak vybrat elektromotor
Vinutí rotoru
- Rotor klece na veverku (klec na veverku)
- Nasouvací rotor: vinutí rotoru je spojeno se sběracími kroužky, které se otáčejí s hřídelí motoru. Pomocí kov-grafitových kartáčů je k okruhu rotoru připojen startovací-regulační reostat. Pomocí tohoto reostatu můžete snížit rozběhový proud a regulovat rychlost otáčení hřídele motoru.
Statorové vinutí, napájecí napětí
Statorové vinutí lze zapojit do hvězdy nebo trojúhelníku.
Pokud je na typovém štítku motoru uvedeno: 220/380, D/Y, to znamená, že motor lze připojit k síti s Uл = 220 V podle obvodu „trojúhelník“ a s Uл = 380 V – podle obvodu „hvězda“.
Pro motory IEC je standardní napětí 230/400 V a pro domácí – 220/380 V.
Standardní velikost
Velikost rámu je vzdálenost v milimetrech „od podlahy“ k ose hřídele motoru. Standardní velikosti domácích motorů (GOST) a dovážených motorů (IEC, NEMA) se obecně neshodují: naše motory jsou nižší než dovážené motory stejného výkonu.
Materiál těla (rámu).
- Hliník
- Litina.
Účinnost
Účinnost η se rovná poměru mechanického výkonu na hřídeli P motoru2 na elektrickou energii odebíranou ze sítě P1.
Výstupní výkon je menší než příkon o množství ztrát.
Třída energetické účinnosti
- EFF1 (vysokoúčinné motory)
- EFF2 (motory s vylepšenou účinností)
- EFF3 (motory s konvenční účinností).
Montážní design
- Nohy (Noha) lité s tělem nebo šroubované
- Příruby (příruba) se zadlabacími otvory (malé příruby) nebo průchozími otvory (velké příruby)
- Kombinované – tlapky a příruba.
Třída ochrany krytu motoru IP
Standardní stupeň krytí elektromotorů je IP55.
Rychlost otáčení
Rychlost otáčení magnetického pole motoru (synchronní rychlost):
n1 = 60f/p [ot./min],
kde p je počet párů pólů motoru,
f je frekvence sítě (50 Hz).
- 2 póly – 3000 ot./min
- 4 póly – 1500 ot./min (standardně)
- 6 pólů – 1000 ot./min
- 8 pólů – 750 ot./min
- 10 pólů – 600 ot./min
- 12 pólů – 500 ot./min.
Rychlost otáčení rotoru asynchronního motoru je menší než rychlost otáčení magnetického pole:
n2 =n1(1 – s),
kde s je skluz.
Vícerychlostní elektromotory jsou motory, u kterých je skoková změna rychlosti realizována přepínáním počtu párů pólů.
Okolní teplota a nadmořská výška
Při instalaci motoru nad 1000 metrů nad mořem a při provozu za zvýšených okolních teplot je nutné počítat se snížením (Derating) výkonu motoru (existují na to speciální tabulky).
Třída tepelné odolnosti izolace
- B – 130 °C
- F – 150 °C (dost pro provoz z frekvenčního měniče)
- H – 180 °C
Jmenovité charakteristiky motoru pro všechny třídy izolace jsou uvedeny pro teplotu chladicí kapaliny +40°C.
Provozní režim
- S1 – trvale: motor běží při ustálené teplotě
- S2 – krátkodobě: motor se nestihne zahřát na stanovenou teplotu, ale během zastavení se stihne úplně vychladit
- S3 – přerušovaný: provoz s konstantní zátěží se střídá s odstávkami, přičemž motor se nestihne ani zahřát, ani zchladit na ustálenou teplotu
- S4 – opakované krátkodobé s dlouhými starty: motor se nestihne zahřát ani zchladit na ustálenou teplotu
- S5 – přerušovaný s dlouhými starty a elektrickým brzděním: motor se nestihne zahřát ani zchladit na ustálenou teplotu
- S6 – přerušovaný: práce s konstantní zátěží se střídá s prací na volnoběh, přičemž se motor nestihne ani zahřát, ani zchladit na ustálenou teplotu
- S7 – přerušovaný s dlouhými starty a brzděním: motor se nestihne zahřát ani vychladit na ustálenou teplotu
- S8 – přerušované s periodickými změnami rychlosti otáčení: motor nemá čas se zahřát ani ochladit na ustálenou teplotu
Tepelná ochrana motoru
- PTC termistory jsou rezistory, jejichž odpor se okamžitě zvýší, když je dosaženo dané teploty. 1 až 3 termistory jsou zapojeny do série pro signalizaci vypínací teploty (Trip), například 155°C. Další řetězec termistoru lze nastavit na signál Alarm, například 145°C.
- PT100 – platinové snímače teploty mají vysokou odolnost proti oxidaci a vysokou přesnost měření. PT100 se připojují pomocí 2, 3 nebo 4vodičového obvodu (čím více vodičů, tím méně rušení).
Do vinutí statoru lze instalovat 3 až 6 snímačů PT100.
Další 2 snímače PT100 lze použít pro měření teplot ložisek. - KTY jsou křemíkové tepelné senzory s kladným koeficientem odporu, vyznačující se vysokou linearitou, vysokým výkonem, spolehlivým polovodičovým designem a nízkou cenou.
Servisní faktor
Motor s provozním faktorem 1.1 může nepřetržitě pracovat s přetížením 10 % jmenovitého výstupního momentu.
Třída točivého momentu
Třída momentu ukazuje násobek rozběhového momentu (s přímým startem ze sítě) při napětí sníženém o 5 %:
- Třída 16 – 160 %
- Třída 13 – 130 %
- Třída 10 – 100 %
- Třída 7 – 70 %
- Třída 5 – 50 %
Účiník cos φ
Účiník (cos φ) se rovná poměru činného výkonu spotřebovaného motorem k celkovému výkonu.
Aktivní síla se vynakládá na užitečnou práci.
Zdánlivý výkon se rovná geometrickému součtu činného a jalového výkonu.
Jalový výkon se vynakládá na magnetizaci motoru.
Antikondenzační topení
Existují dva způsoby, jak vysušit vinutí před spuštěním motoru ve vlhké místnosti:
- Použijte motor se speciálním vestavěným topením
- Na jedno vinutí statoru přiveďte napětí 4 až 10 % jmenovité hodnoty (pro průchod proudu 20 až 30 % jmenovité hodnoty), které stačí k odpaření kondenzátu (neplatí pro všechny motory). Některé frekvenční měniče to umí.
Chlazení
- Povrchové chlazení (bez ventilace: bez ventilátoru)
- Vlastní ventilace: ventilátor na hřídeli motoru
- Nucené chlazení (nezávislý ventilátor nebo kapalinové chlazení vodou nebo olejem)
U turbo mechanismů (ventilátory a čerpadla, u kterých je kroutící moment na hřídeli úměrný druhé mocnině otáček) většinou postačí vlastní odvětrání.
Motory, které pracují z frekvenčních měničů s konstantním momentem po dlouhou dobu při nízkých otáčkách, musí být buď předimenzovány, nebo opatřeny nuceným chlazením.
Fan
- Plastický
- Kovové
- Kov se zvýšeným momentem setrvačnosti
Požadavky na motor při provozu z frekvenčního měniče
- Teplotní třída izolace není nižší než F
- Možnost nuceného větrání (viz výše)
- Izolované ložisko na nepracovní straně hřídele (doporučeno pro velikosti 225 a vyšší)
Ložiska
Při provozu z frekvenčního měniče při frekvencích nad 50 Hz se snižuje životnost ložisek.
Některé motory mají na pracovní straně hřídele nainstalované plovoucí ložisko a na nepracovní straně pevné ložisko (Located bearing). U ostatních je to naopak (například pro spojení s převodovkou).
Ložiska jsou standardně odpružena v axiálním směru (podél hřídele), aby byl zajištěn rovnoměrný chod motoru. Motory s ložisky s kosoúhlým stykem takovou pružinu nemají, takže radiální síla (kolmo na hřídel – např. od řemene) musí působit neustále, jinak ložisko rychle selže.
Tuk
U motorů s velikostí rámu do 250 pracujících ve jmenovitém režimu je mazivo zpravidla dimenzováno na celou životnost ložisek.
Pro doplnění maziva musí mít motor speciální vsuvku.
Hřídel motoru
Motor může mít druhý konec hřídele motoru, který může přenášet jak jmenovitý, tak menší točivý moment.
Druhý konec hřídele je nekompatibilní s volitelnými doplňky, jako je snímač rychlosti a nucený chladicí ventilátor a případně také brzda.
Brzda
Při výběru brzdy je třeba vzít v úvahu:
- Typ:
- statické (přídržná brzda se aktivuje pouze tehdy, když hřídel stojí)
- dynamický (můžete upravit brzdný moment, menší opotřebení v případě nouzového brzdění)
Snímač rychlosti
Snímač rychlosti může být umístěn hermeticky uvnitř pouzdra (zapouzdřený) nebo vně pod ochranným krytem.
Synchronní elektromotor s budícím vinutím je synchronní elektromotor, jehož rotor je vyroben s budicím vinutím.
Návrh synchronního elektromotoru s budícím vinutím
Synchronní elektromotor s budícím vinutím se jako každý točivý elektromotor skládá z rotoru a statoru. Stator je stacionární část, rotor je rotační část. Stator má obvykle standardní třífázové vinutí a rotor je vyroben s budicím vinutím. Budicí vinutí je připojeno ke sběracím kroužkům, do kterých je přiváděna energie přes kartáče.
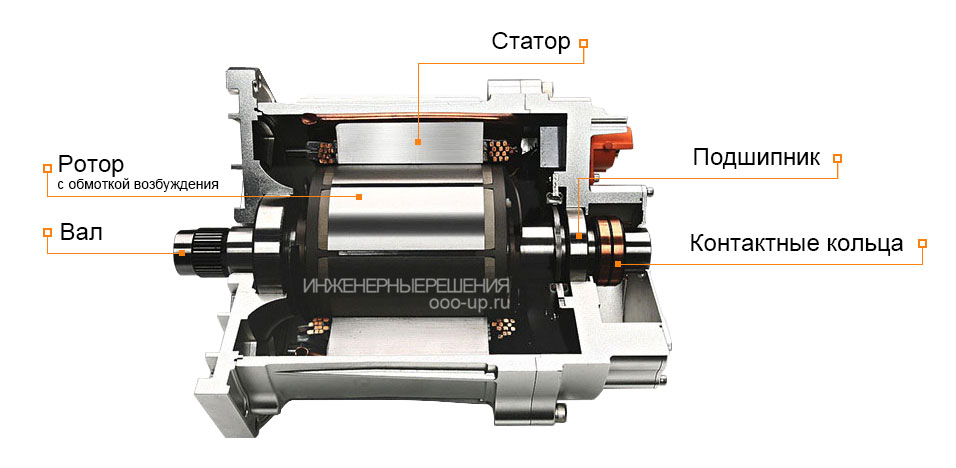
Synchronní motor s buzením (kartáče nejsou zobrazeny)
Princip činnosti
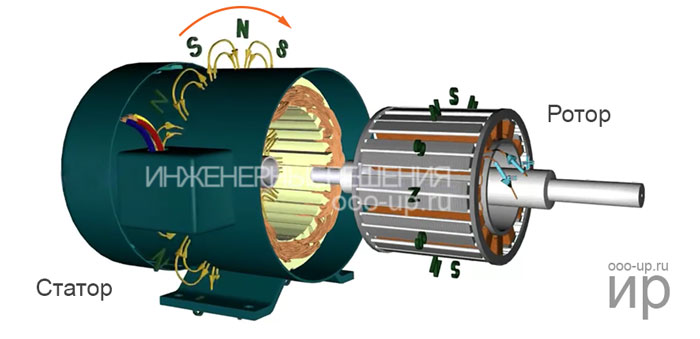
Konstantní rychlosti otáčení synchronního elektromotoru je dosaženo interakcí mezi konstantním a rotujícím magnetickým polem. Rotor synchronního elektromotoru vytváří konstantní magnetické pole a stator vytváří rotující magnetické pole.
Činnost synchronního elektromotoru je založena na interakci rotujícího magnetického pole statoru a konstantního magnetického pole rotoru
Stator: rotující magnetické pole
Do vinutí statorových cívek je přiváděno třífázové střídavé napětí. V důsledku toho vzniká rotující magnetické pole, které se otáčí rychlostí úměrnou frekvenci napájecího napětí. Více informací o tom, jak vzniká točivé magnetické pole pomocí třífázového napájecího napětí, naleznete v článku „Třífázový asynchronní elektromotor“.
Interakce mezi rotujícím (u statoru) a konstantním (u rotoru) magnetickým polem
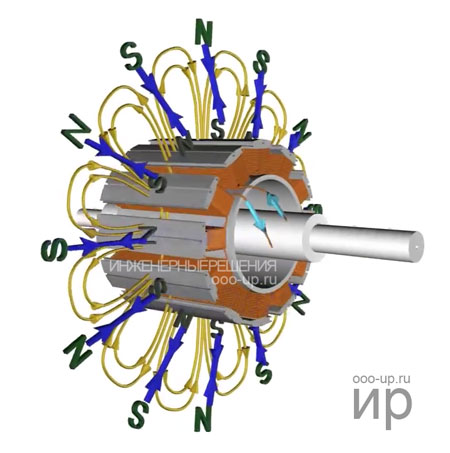
Rotor: konstantní magnetické pole
Vinutí rotoru je buzeno zdrojem stejnosměrného proudu přes sběrací kroužky. Magnetické pole vytvořené kolem rotoru buzeného stejnosměrným proudem je znázorněno níže. Je zřejmé, že rotor se chová jako permanentní magnet, protože má stejné magnetické pole (alternativně si lze představit, že rotor je vyroben z permanentních magnetů). Uvažujme interakci rotoru a rotujícího magnetického pole. Předpokládejme, že dáte rotoru počáteční rotaci ve stejném směru jako rotující magnetické pole. Opačné póly rotujícího magnetického pole a rotoru se k sobě přitahují a pomocí magnetických sil se slepí. To znamená, že rotor se bude otáčet stejnou rychlostí jako rotující magnetické pole, to znamená, že rotor se bude otáčet synchronní rychlostí.
Magnetická pole rotoru a statoru jsou vzájemně propojena
Synchronní rychlost
Rychlost, kterou se magnetické pole otáčí, lze vypočítat pomocí následující rovnice:

- kde Ns – frekvence rotace magnetického pole, ot./min,
- f – frekvence statorového proudu, Hz,
- p – počet párů pólů.
To znamená, že otáčky synchronního motoru lze velmi přesně řídit změnou frekvence napájecího proudu. Tyto elektromotory jsou tedy vhodné pro vysoce přesné aplikace.
Přímé spouštění synchronního motoru z elektrické sítě
Proč se synchronní elektromotory nespouštějí z elektrické sítě?
Pokud rotor nemá žádnou počáteční rotaci, je situace odlišná od výše popsané situace. Severní pól magnetického pole rotoru bude přitahován k jižnímu pólu rotujícího magnetického pole a začne se pohybovat stejným směrem. Ale protože rotor má určitý moment setrvačnosti, jeho startovací rychlost bude velmi nízká. Během této doby bude jižní pól rotujícího magnetického pole nahrazen severním pólem. To vytvoří odpudivé síly. V důsledku toho se rotor začne otáčet v opačném směru. Rotor se tak nebude moci spustit.
Vinutí klapky – přímý start synchronního motoru z elektrické sítě
Pro realizaci samorozběhu synchronního elektromotoru bez řídicího systému je mezi hroty rotoru umístěna „klece nakrátko“, které se také říká vinutí tlumiče. Když se elektromotor rozběhne, cívky rotoru nejsou buzeny. Vlivem rotujícího magnetického pole se v závitech „klece nakrátko“ indukuje proud a rotor se začne otáčet stejným způsobem, jako se spouštějí indukční motory.
Když rotor dosáhne své maximální rychlosti, je energie přivedena na budicí vinutí rotoru. V důsledku toho, jak již bylo zmíněno dříve, póly rotoru zabírají s póly rotujícího magnetického pole a rotor se začíná otáčet synchronní rychlostí. Když se rotor otáčí synchronní rychlostí, relativní pohyb mezi klecí veverky a rotujícím magnetickým polem je nulový. To znamená, že ve zkratovaných závitech není žádný proud, a proto „klec nakrátko“ neovlivňuje synchronní chod elektromotoru.
Nesynchronizováno
Synchronní elektromotory mají konstantní otáčky nezávislé na zatížení (za předpokladu, že zatížení nepřekročí maximální přípustnou hodnotu). Pokud je zatěžovací moment větší než točivý moment vytvářený samotným elektromotorem, dojde k výpadku synchronizace a zastavení. Nízké napájecí napětí a nízké budicí napětí mohou také způsobit, že motor vypadne ze synchronizace.
Synchronní kompenzátor
Synchronní motory lze také použít ke zlepšení účiníku systému. Pokud je jediným účelem použití synchronních motorů zlepšit účiník, nazývají se synchronní kompenzátory. V tomto případě není hřídel motoru připojena k mechanické zátěži a volně se otáčí.



