Změna otáček rotoru asynchronního motoru | Obsluha elektrických strojů a zařízení | Archiv | knihy
V podmínkách provozu elektrických instalací je někdy nutné změnit jmenovitou rychlost otáčení rotoru motorů s kotvou nakrátko. V některých případech je přepínání daného vinutí statoru motoru na jiný počet pólů výhodnější než převíjení motoru na jinou rychlost, protože vinutí lze přepínat relativně rychle bez plýtvání drátem vinutí. Připojením na přední části je možné přepnout na vyšší nebo nižší rychlost otáčení vinutí motoru.
Asynchronní motory je možné přepnout na vyšší otáčky s jednovrstvým nebo dvouvrstvým vinutím na statoru.
Pokud má stator jednovrstvé vinutí (dvourovinné nebo řetězové, nikoli „rovné“), lze rychlost otáčení rotoru motoru pouze zdvojnásobit. Počet pólových párů původního vinutí musí být sudý, to znamená, že rychlost otáčení před přepnutím by měla být přibližně 1500 a 750 ot./min. Zvýšení rychlosti otáčení rotoru motoru s jednovrstvým vinutím na statoru je dosaženo změnou směru proudu v polovičních fázích na každých čtyřech sousedních pólech původního vinutí. Při přepínání motoru z 1500 na 3000 ot/min (synchronní) stačí změnit směr proudů v polovičních fázích vinutí. Na obrázku 101 je základní schéma spínání jedné fáze motoru s jednovrstvým vinutím na dvojnásobnou rychlost otáčení.
Při přepnutí statorového vinutí na menší počet pólů se změní stupňové vyjádření rozteče zubů.
Proto se začátek střední fáze přenese na další skupinu cívek, aby se získal prostorový posun fázových vinutí 120 el i při vyšší rychlosti otáčení. stupně.

Rýže. 101. Schéma přepínání fáze motoru z nižší (a) na vyšší (b) rychlost otáčení.
Přepínání asynchronních motorů s jednovrstvým vinutím na vysokou rychlost otáčení vede k výraznému zkreslení magnetického pole. Z tohoto důvodu se spínaný motor při startu zasekne na přibližně 1/7 nových jmenovitých otáček. Pro eliminaci jevu prodlevy rotoru při vzletu je třeba motor nastartovat na nižší otáčky a poté přepnout na vyšší. V tomto případě se získá dvourychlostní motor s devíti volnými konci vinutí statoru. Základní schéma dvourychlostního motoru je na obrázku 102. K ovládání motoru lze použít vícekontaktní otočný přepínač nebo dva třípólové přepínače, jak je znázorněno na obrázku 102. Pro spuštění jsou oba přepínače sepnuty do horní polohy a motor se otáčí nižší rychlostí. Poté se spínače současně přesunou do spodní polohy a motor se přepne na vyšší otáčky.

Rýže. 102. Schéma dvourychlostního motoru získaného z jednorychlostního motoru s jednovrstvým statorovým vinutím.
Přepnutí motoru na vyšší otáčky je doprovázeno změnou indukčního a magnetického toku stroje. V důsledku toho se mírně zvyšuje zahřívání statoru. Účinnost a cosφ motoru se po přepnutí na vyšší otáčky při jmenovitém napětí nemění.
S dvouvrstvým statorovým vinutím lze otáčky motoru zdvojnásobit (při sudém počtu pólů) a na nejbližší vyšší synchronní otáčky.
Pro zdvojnásobení otáček motoru je nutné zvýšit počet cívek ve skupině cívek, čehož se dosáhne zapojením dvou sousedních skupin cívek do série v původním vinutí.
Při změně otáček motoru na nejbližší vyšší, např. z 1000 na 1500 ot/min, je nutné přeskupit cívky podle nového počtu pólů vinutí. K tomu je nutné oddělit některé skupiny cívek umístěné na určitých místech, aby se vytvořily nové s požadovaným počtem cívek v nich. Pokud mělo vinutí při 1000 ot./min dvě cívky ve skupině, pak by po přepnutí na 1500 ot./min měly skupiny cívek obsahovat tři cívky. K získání takových skupin musí být šest skupin původního vinutí, rovnoměrně rozmístěných podél vrtání statoru, rozděleno do dvou cívek a postupně připojeno po jedné ke skupinám umístěným vpravo a vlevo od oddělené skupiny.
Po vytvoření skupin s určitým počtem cívek se fáze spojí způsobem obvyklým u dvouvrstvých vinutí. Výsledkem přepínání je klasické dvouvrstvé vinutí s velmi silným zkrácením kroku. Toto zkrácení je tím větší, čím vyšší jsou otáčky motoru přepnuty.
Při konstantním napětí na fázi motoru po jeho sepnutí výrazně narůstá indukce ve statoru a proud naprázdno, což v některých případech způsobuje zahřívání a snižuje cosφ motoru. K odstranění je nutné snížit napětí na otáčku, čehož lze dosáhnout přepnutím fází z trojúhelníku na hvězdu nebo snížením počtu paralelních větví. Současně klesá výkon motoru. Vzhledem k možnému nárůstu proudu při vyšších otáčkách je možné poněkud zvýšit přípustný výkon motoru po sepnutí s uspokojivými hodnotami účinnosti a cosφ.
Akcelerace motoru po přepnutí na vysoké otáčky je uspokojivá, protože charakter magnetického pole se nemění.
Asynchronní motor se přepíná na nižší otáčky pouze u dvouvrstvého vinutí na statoru se zkrácenou roztečí. Je-li stoupání vinutí takové, že stupeň jeho zkrácení při vyšší rychlosti otáčení není menší než stupeň prodloužení při nižší rychlosti, pak se po přepnutí vinutí dosáhne uspokojivých výsledků provozu motoru.
Rychlost otáčení motoru s dvouvrstvým vinutím lze snížit na polovinu a na nejbližší nižší synchronní rychlost je možné přepnout např. z 1500 na 1000 ot/min nebo z 1000 na 750 ot/min. Pro přechod na nižší rychlost otáčení je nutné rozdělit skupiny cívek původního vinutí v předních částech, vytvořit nové skupiny s počtem cívek v nich odpovídajícím snížené rychlosti (větší počet pólů). Pokud mělo vinutí při 1500 ot./min skupiny po třech cívkách, tak při přepnutí na 1000 ot./min je nutné tvořit skupiny po dvou cívkách. Nově získané skupiny pro dvouvrstvá vinutí jsou spojeny do fází.
Snížení rychlosti otáčení přepínáním tohoto vinutí je doprovázeno zvýšením indukce, proudu naprázdno a zahříváním motoru při nízké účinnosti a cos φ.
Dlouhodobý provoz motoru za těchto podmínek je nemožný. Podmínky se zhoršují, čím více se otáčky motoru snižují, aby se to odstranilo, musí se snížit fázové napětí motoru. Toho lze dosáhnout přepnutím na nejbližší nižší standardní napětí, přepnutím ze schématu zapojení fáze do trojúhelníku do hvězdy a snížením paralelních větví ve fázích.
Přepnutím dvouvrstvého vinutí na nižší otáčky lze získat dvourychlostní motor. Nejjednodušší způsob, jak to udělat, je přeřadit převody s poměrem 2:1. Aby toho bylo dosaženo, musí mít původní vinutí výrazně zkrácenou rozteč a mít dvě paralelní větve ve fázích. Nižší rychlosti otáčení je dosaženo změnou směru proudu v odpovídajících polovičních fázích vinutí. K tomuto účelu se používá pohodlný obvod dvojitá hvězda – jedna hvězda se šesti volnými svorkami vinutí. Při nejvyšších otáčkách motor pracuje v konfiguraci s dvojitou hvězdou a při nejnižších otáčkách v konfiguraci s jednou hvězdou.
Motor s klasickým dvouvrstvým vinutím lze přeměnit na dvourychlostní motor s jiným poměrem otáček, například 3:2. Takový motor vyžaduje složité spínací zařízení pro změnu rychlosti otáčení.
Rychlost otáčení motoru lze řídit změnou (snižováním) napětí na jeho svorkách. To je založeno na závislosti M = f(s) (185), která za předpokladu konstantních parametrů motoru a konstantní frekvence aplikovaného napětí v mezích s 
Obrázek 176 znázorňuje křivky momentu motoru při různých hodnotách primárního napětí; pokud skluz s1 odpovídá provozu motoru na daném napětí.

Obr. 176. Mechanické vlastnosti asynchronního motoru při různých hodnotách napětí.
Jak je vidět, rozsah regulace otáček rovný (1—s) je velmi malý. Rozšíření regulačního rozsahu se dosahuje s ploššími mechanickými charakteristikami, tj. u motorů s velkou hodnotou sK. Je však třeba mít na paměti, že ztráty vznikající v sekundárním okruhu se rovnají skluzovému výkonu [viz vzorec (159)]. Další nevýhodou je, že když
S klesajícím napětím se přetížitelnost motoru snižuje úměrně k jeho druhé mocnině. Mezi výhody této metody patří možnost použití u zkratovaných motorů, plynulá regulace otáček a jednoduchost a spolehlivost provozu. Napětí na svorkách motoru při nezměněném síťovém napětí se mění pomocí nastavitelného autotransformátoru nebo řízených saturačních tlumivek instalovaných mezi sítí a statorem motoru. Při změně hodnoty stejnosměrného proudu magnetizace se mění indukční odpor tlumivek, což způsobuje změnu napětí na svorkách motoru.
Zhoršení chlazení motorů s vlastním větráním se snižující se rychlostí otáčení vede k nutnosti zvýšit jmenovitý výkon motoru (zvětšit rozměr regulovaného motoru oproti neregulovanému). Míra nadhodnocení výkonu závisí na tvaru mechanické charakteristiky motoru (její plochosti v oblasti provozních režimů), typu statického zatížení a rozsahu regulace.
Volba elektromotoru podle výkonu, saturačních tlumivek nebo autotransformátoru pro řízený pohon je samostatnou otázkou, která se řeší v kurzech o elektrických pohonech a v periodické literatuře.
Metody regulace otáček změnou napětí jsou slibné především pro pohony s vějířovou charakteristikou momentu, mechanismu nebo konstantního momentu, ale s malým regulačním rozsahem. Takové pohony jsou v zemědělské výrobě poměrně běžné.
Metoda regulace otáček změnou napětí se používá také u motorů s fázovým rotorem a v tomto případě jsou pro dosažení hladších mechanických charakteristik motoru do obvodu rotoru zahrnuty další odpory.
Jiné metody regulace rychlosti
Uvažované metody regulace otáček lze považovat za nejběžnější. Mezi další možné metody lze jmenovat metodu regulace otáček motoru s fázovým rotorem zahrnutím indukčních odporů do obvodu rotoru, pevně spojených s obvodem rotoru a umístěných na stejném hřídeli s ním (Rozovův motor, obr. 178), a také metodu pulzního řízení. Při pulzním řízení je motor trvale připojen k síti a odpojen od sítě, nebo se pomocí stykače K přepínají odpory připojené mezi síť a stator motoru (obr. 179).
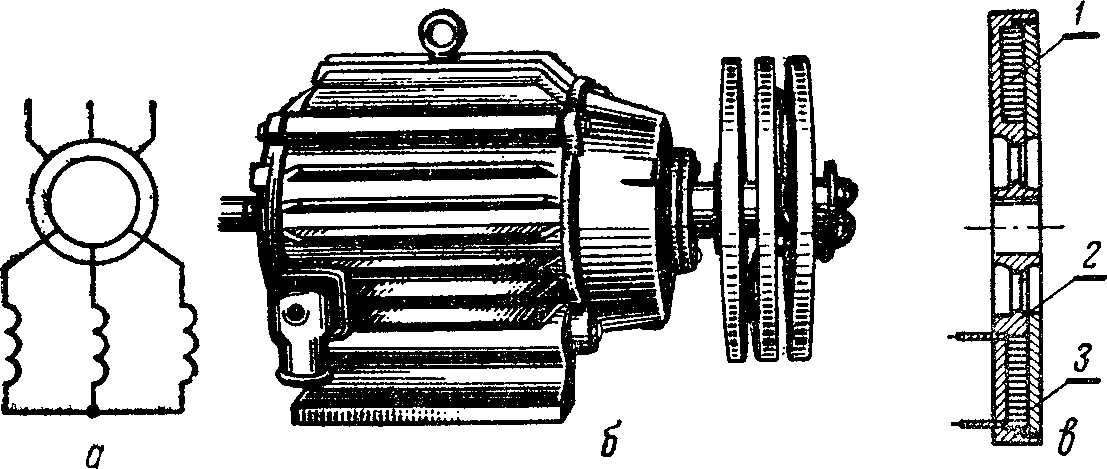
Obr. 178. Motor s indukčními odpory v rotoru:
a — elektrický obvod; b — vnější vzhled; c — konstrukce indukčního odporu; 1 — cívka; 2 — diskové těleso; 3 — kryt.

Obr. 179. Schéma pulzní regulace otáček asynchronního motoru.
V závislosti na frekvenci a délce trvání pulzů pracuje motor s přibližně konstantní rychlostí otáčení. Regulace je spojena se zhoršením energetického výkonu, je doprovázena proudovými rázy a používá se pouze u motorů s velmi nízkým výkonem.