Servopohony: typy, vlastnosti, použití

Vytvoření robotů a automatizovaných systémů není možné bez použití zařízení, jako jsou servopohony nebo, jak se jim také říká, servomotory. Na rozdíl od standardních elektromotorů, které mohou otáčet hřídelí v jednom směru bez zastavení, poskytují servomotory schopnost pohybovat se s vysokou přesností. Úpravou rychlosti otáčení běžného elektromotoru můžete měnit frekvenci a napětí (u střídavých motorů) nebo řídit šířku řídicích impulsů (u stejnosměrných). Pro řešení problémů souvisejících s otáčením hřídele pod určitým úhlem nebo udržováním dané rychlosti otáčení jsou však servopohony nepostradatelné.
V oblasti modelování a leteckého inženýrství se serva používají k přesnému ovládání poloh různých komponent, jako jsou kormidla, zatahovací podvozek, vztlakové klapky a další pohyblivé části.
Klíčové vlastnosti servopohonů
- Moment je jednou z nejdůležitějších vlastností servopohonů. Tento parametr přímo závisí na napájecím napětí zařízení.
- Provozní napětí. Aby servopohony fungovaly, je důležité dodávat napětí v přijatelných mezích. Protokoly a rozsahy provozního napětí pro každý model naleznete v jejich technické dokumentaci.
- Maximální úhel natočení. Zatímco většina serv je schopna rotace až o 180°, existují modely, které nabízejí širší rozsah pohybu. Kromě toho existují také kontinuální rotační servopohony, které se mohou nekonečně otáčet v jednom směru při dané rychlosti a přesto se úplně zastaví.
- Rychlost švihu Doba otáčení hřídele serva je určena časem potřebným k jeho otočení o 60°. Pokud je například rychlost 0,08 sekundy, znamená to, že otočení serva o 60° bude trvat 0,08 sekundy.
- Rozměry a hmotnost hrají také důležitou roli při výběru serva pro různé aplikace, zejména pro modely letadel.
| модель | Točivý moment M, kg/cm | Provozní napětí, V | Maximální úhel natočení, stupně | Rychlost otáčení 60° (s) (stupně za sekundu) | Typ | Rozměry a hmotnost, mm a g |
| Servopohon KST FZ589 | 6 kg/cm při 6.0 V; | 6 – 8.4 | 45° | 0.12 s/60° při 6 V | digitální | 35*15*32,5/40 g |
| 7 kg/cm při 7.4 V | 0.11 s/60° při 7.4 V | |||||
| 8 kg/cm při 8.4 V | 0.10 s/60° při 8.4 V | |||||
| Servopohon KST BLS815 HV | 14 kg/cm při 6.0 V; | 6 – 8.4 | 50° | 0.09 s/60° při 6 V | digitální | 40*20*38/73 g |
| 17 kg/cm při 7.4 V | 0.08 s/60° při 7.4 V | |||||
| 20 kg/cm při 8.4 V | 0.09 s/60° při 8.4 V | |||||
| PowerHD 1501MG | 15.5 kg/cm při 4.8 V, | 4.8 – 6.0 | 180° | 0.16 s/60° při 4.8 V | analog | 40.7×20.5×39.5/60 g |
| 17 kg/cm při 6.0 V | 0.14 s/60° při 6 V |
Servopohon zařízení
Serva fungují na principu zpětné vazby. Vnitřní regulátor zpracovává řídicí signál a porovnává jej s aktuální polohou osy. V případě potřeby vyšle řídicí impuls do elektromotoru, aby uvedl hřídel do požadované polohy nebo udržoval požadovanou rychlost otáčení.
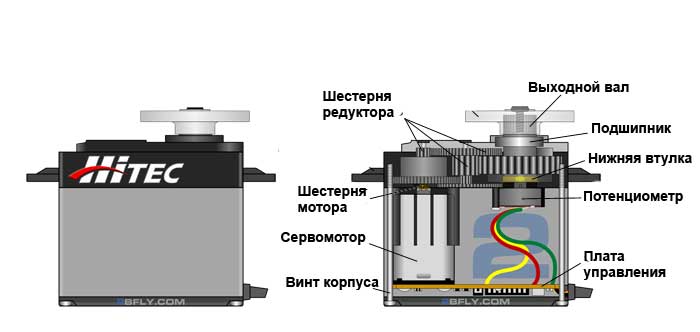
Hlavní komponenty, které tvoří servopohon, jsou:
- Motor: Hlavní prvek, který zajišťuje rotaci osy. V malých modelech se obvykle používají motory s konstantním proudem a v jednoduchých konstrukcích se používají kolektorové motory.
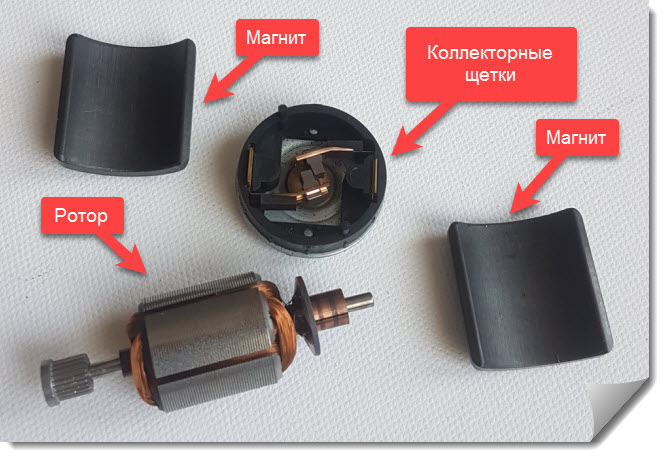
- Převodovka: Tato součást snižuje rychlost otáčení hřídele, která by jinak byla příliš vysoká. Převodovky mohou být plastové nebo kovové. Plastové převody jsou lehké, tiché a odolné proti korozi, zatímco mosazné převody jsou spolehlivější a poskytují přesné polohování.
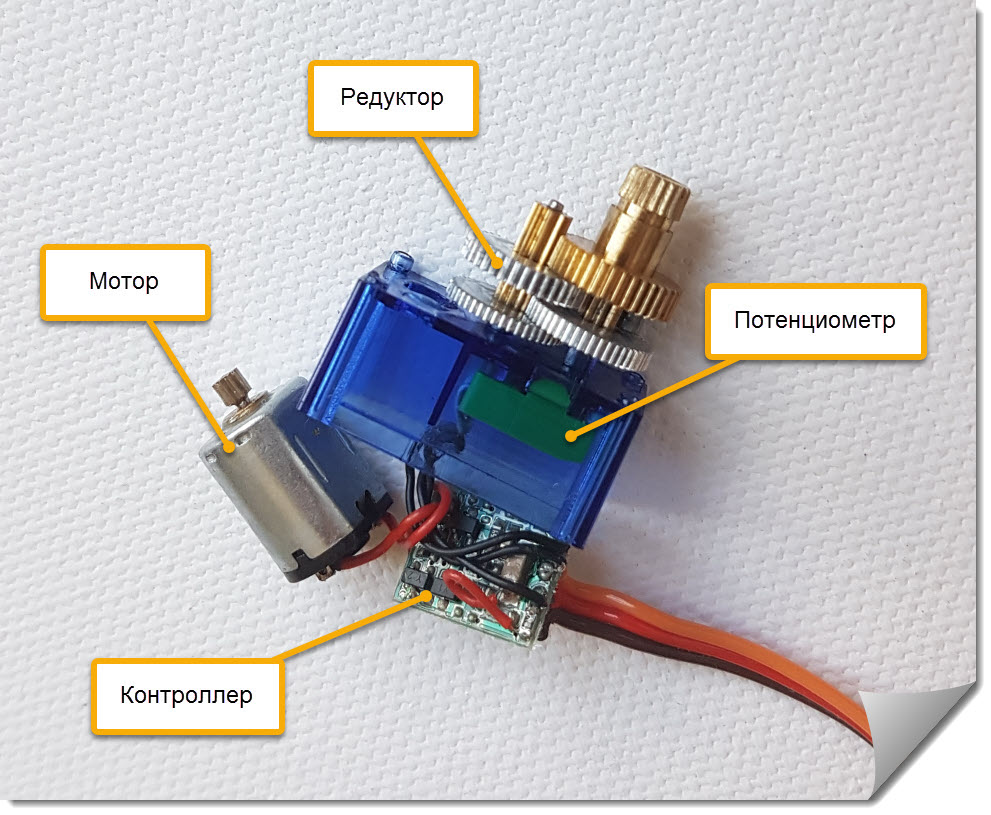
- Potenciometr: Instalováno pro zpětnou vazbu a ovládání polohy hřídele. Otáčení hřídele se přenáší na osu potenciometru, což umožňuje regulátoru sledovat aktuální stav.
- Ovladač: Tento prvek využívá data z potenciometru k udržení nastavené polohy hřídele a reguluje činnost motoru. Pokud je hřídel nucena se otáčet, ovladač aktivuje motor, aby polohu upravil.
Regulátor je potřebný pro všechny typy servopohonů, interpretuje řídicí signály a analyzuje data z potenciometru nebo enkodéru.
Digitální a analogová serva
Serva lze rozdělit na analogová a digitální. Analogové modely využívají tradiční elektronické obvody, zatímco digitální serva jsou vybavena mikrokontrolérem, který poskytuje vyšší přesnost a rychlejší odezvu na řídicí signál. Navzdory vyšší ceně jsou digitální modely preferovány pro aplikace, jako jsou manipulátory a roboty.
Rozhraní pro správu
Serva jsou nejčastěji řízena pomocí pulzně šířkové modulace (PWM), kdy délka pulzu určuje polohu hřídele nebo rychlost otáčení. Kromě toho existují modely s ovladači, které podporují ovládání přes rozhraní I2C, UART, USB, CAN a EtherCAT. V případě potřeby lze převodníky použít pro převod signálů a řízení serv prostřednictvím alternativních protokolů.
Použité informace:
- Mnoho tváří serv
- Řepka Pi a řízení serv, ČÁST 1. Serva – zařízení a způsoby řízení
- Jak vybrat servo